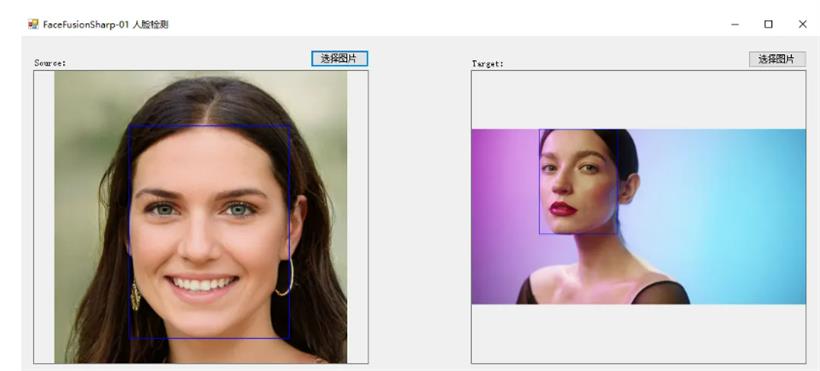
先看效果
人脸检测
 说明
说明
C#版Facefusion一共有如下5个步骤:
1、使用yoloface_8n.onnx进行人脸检测
2、使用2dfan4.onnx获取人脸关键点
3、使用arcface_w600k_r50.onnx获取人脸特征值
4、使用inswapper_128.onnx进行人脸交换
5、使用gfpgan_1.4.onnx进行人脸增强
本文分享使用yoloface_8n.onnx实现C#版Facefusion第一步:人脸检测。
顺便再看一下C++代码的实现方式,可以对比学习。
模型信息
Model Properties
-------------------------
date:2024-01-13T23:32:01.523479
description:Ultralytics YOLOv8n-pose model trained on /ssd2t/derron/ultralytics/ultralytics/datasets/widerface.yaml
author:Ultralytics
kpt_shape:[5, 3]
task:pose
license:AGPL-3.0 https://ultralytics.com/license
version:8.1.0
stride:32
batch:1
imgsz:[640, 640]
names:{0: 'face'}
---------------------------------------------------------------
Inputs
-------------------------
name:images
tensor:Float[1, 3, 640, 640]
---------------------------------------------------------------
Outputs
-------------------------
name:output0
tensor:Float[1, 20, 8400]
---------------------------------------------------------------
项目
 代码
代码
调用代码
using OpenCvSharp;
using OpenCvSharp.Extensions;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Windows.Forms;
namespace FaceFusionSharp
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string source_path = "";
string target_path = "";
Yolov8Face detect_face;
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
source_path = ofd.FileName;
pictureBox1.Image = new Bitmap(source_path);
}
private void button3_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox2.Image = null;
target_path = ofd.FileName;
pictureBox2.Image = new Bitmap(target_path);
}
private void button1_Click(object sender, EventArgs e)
{
if (pictureBox1.Image == null)
{
return;
}
button1.Enabled = false;
Application.DoEvents();
Mat source_img = Cv2.ImRead(source_path);
Mat target_img = Cv2.ImRead(target_path);
List<Bbox> boxes;
boxes = detect_face.detect(source_img);
if (boxes.Count == 0)
{
MessageBox.Show("Source中未检测到人脸!");
button1.Enabled = true;
return;
}
//绘图
Cv2.Rectangle(source_img, new OpenCvSharp.Point(boxes[0].xmin, boxes[0].ymin), new OpenCvSharp.Point(boxes[0].xmax, boxes[0].ymax), new Scalar(255, 0, 0), 2);
//显示
pictureBox1.Image = source_img.ToBitmap();
if (pictureBox2.Image == null)
{
return;
}
boxes = detect_face.detect(target_img);
if (boxes.Count == 0)
{
MessageBox.Show("target_img中未检测到人脸!");
button1.Enabled = true;
return;
}
//绘图
Cv2.Rectangle(target_img, new OpenCvSharp.Point(boxes[0].xmin, boxes[0].ymin), new OpenCvSharp.Point(boxes[0].xmax, boxes[0].ymax), new Scalar(255, 0, 0), 2);
//显示
pictureBox2.Image = target_img.ToBitmap();
}
private void Form1_Load(object sender, EventArgs e)
{
detect_face = new Yolov8Face("model/yoloface_8n.onnx");
target_path = "images/target.jpg";
source_path = "images/source.jpg";
pictureBox1.Image = new Bitmap(source_path);
pictureBox2.Image = new Bitmap(target_path);
}
}
}
Yolov8Face.cs
using Microsoft.ML.OnnxRuntime;
using Microsoft.ML.OnnxRuntime.Tensors;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Linq;
namespace FaceFusionSharp
{
internal class Yolov8Face
{
float[] input_image;
int input_height;
int input_width;
float ratio_height;
float ratio_width;
float conf_threshold;
float iou_threshold;
SessionOptions options;
InferenceSession onnx_session;
public Yolov8Face(string modelpath, float conf_thres = 0.5f, float iou_thresh = 0.4f)
{
options = new SessionOptions();
options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options.AppendExecutionProvider_CPU(0);
// 创建推理模型类,读取本地模型文件
onnx_session = new InferenceSession(modelpath, options);
this.input_height = 640;
this.input_width = 640;
conf_threshold = conf_thres;
iou_threshold = iou_thresh;
}
void preprocess(Mat srcimg)
{
int height = srcimg.Rows;
int width = srcimg.Cols;
Mat temp_image = srcimg.Clone();
if (height > input_height || width > input_width)
{
float scale = Math.Min((float)input_height / height, (float)input_width / width);
Size new_size = new Size((int)(width * scale), (int)(height * scale));
Cv2.Resize(srcimg, temp_image, new_size);
}
ratio_height = (float)height / temp_image.Rows;
ratio_width = (float)width / temp_image.Cols;
Mat input_img = new Mat();
Cv2.CopyMakeBorder(temp_image, input_img, 0, input_height - temp_image.Rows, 0, input_width - temp_image.Cols, BorderTypes.Constant, 0);
Mat[] bgrChannels = Cv2.Split(input_img);
for (int c = 0; c < 3; c++)
{
bgrChannels[c].ConvertTo(bgrChannels[c], MatType.CV_32FC1, 1 / 128.0, -127.5 / 128.0);
}
Cv2.Merge(bgrChannels, input_img);
foreach (Mat channel in bgrChannels)
{
channel.Dispose();
}
input_image = Common.ExtractMat(input_img);
input_img.Dispose();
}
public List<Bbox> detect(Mat srcimg)
{
preprocess(srcimg);
Tensor<float> input_tensor = new DenseTensor<float>(input_image, new[] { 1, 3, input_height, input_width });
List<NamedOnnxValue> input_container = new List<NamedOnnxValue>
{
NamedOnnxValue.CreateFromTensor("images", input_tensor)
};
var ort_outputs = onnx_session.Run(input_container).ToArray();
// 形状是(1, 20, 8400),不考虑第0维batchsize,每一列的长度20,前4个元素是检测框坐标(cx,cy,w,h),第4个元素是置信度,剩下的15个元素是5个关键点坐标x,y和置信度
float[] pdata = ort_outputs[0].AsTensor<float>().ToArray();
int num_box = 8400;
List<Bbox> bounding_box_raw = new List<Bbox>();
List<float> score_raw = new List<float>();
for (int i = 0; i < num_box; i++)
{
float score = pdata[4 * num_box + i];
if (score > conf_threshold)
{
float xmin = (float)((pdata[i] - 0.5 * pdata[2 * num_box + i]) * ratio_width); //(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float ymin = (float)((pdata[num_box + i] - 0.5 * pdata[3 * num_box + i]) * ratio_height); //(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float xmax = (float)((pdata[i] + 0.5 * pdata[2 * num_box + i]) * ratio_width); //(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float ymax = (float)((pdata[num_box + i] + 0.5 * pdata[3 * num_box + i]) * ratio_height); //(cx,cy,w,h)转到(x,y,w,h)并还原到原图
//坐标的越界检查保护,可以添加一下
bounding_box_raw.Add(new Bbox(xmin, ymin, xmax, ymax));
score_raw.Add(score);
//剩下的5个关键点坐标的计算,暂时不写,因为在下游的模块里没有用到5个关键点坐标信息
}
}
List<int> keep_inds = Common.nms(bounding_box_raw, score_raw, iou_threshold);
int keep_num = keep_inds.Count();
List<Bbox> boxes = new List<Bbox>();
for (int i = 0; i < keep_num; i++)
{
int ind = keep_inds[i];
boxes.Add(bounding_box_raw[ind]);
}
return boxes;
}
}
}
Bbox.cs
namespace FaceFusionSharp
{
public class Bbox
{
public Bbox(float xmin, float ymin, float xmax, float ymax)
{
this.xmin = xmin;
this.ymin = ymin;
this.xmax = xmax;
this.ymax = ymax;
}
public float xmin { get; set; }
public float ymin { get; set; }
public float xmax { get; set; }
public float ymax { get; set; }
}
}
ExtractMat方法
public static float[] ExtractMat(Mat src)
{
OpenCvSharp.Size size = src.Size();
int channels = src.Channels();
float[] result = new float[size.Width * size.Height * channels];
GCHandle resultHandle = default;
try
{
resultHandle = GCHandle.Alloc(result, GCHandleType.Pinned);
IntPtr resultPtr = resultHandle.AddrOfPinnedObject();
for (int i = 0; i < channels; ++i)
{
Mat cmat = new Mat(
src.Height, src.Width,
MatType.CV_32FC1,
resultPtr + i * size.Width * size.Height * sizeof(float));
Cv2.ExtractChannel(src, cmat, i);
cmat.Dispose();
}
}
finally
{
resultHandle.Free();
}
return result;
}
C++代码
我们顺便看一下C++代码yolov8face的实现,方便对比学习。
yolov8face.h
# ifndef YOLOV8FACE
# define YOLOV8FACE
#include <fstream>
#include <sstream>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
//#include <cuda_provider_factory.h> ///如果使用cuda加速,需要取消注释
#include <onnxruntime_cxx_api.h>
#include"utils.h"
class Yolov8Face
{
public:
Yolov8Face(std::string modelpath, const float conf_thres=0.5, const float iou_thresh=0.4);
void detect(cv::Mat srcimg, std::vector<Bbox> &boxes); ////只返回检测框,置信度和5个关键点这两个信息在后续的模块里没有用到
private:
void preprocess(cv::Mat img);
std::vector<float> input_image;
int input_height;
int input_width;
float ratio_height;
float ratio_width;
float conf_threshold;
float iou_threshold;
Ort::Env env = Ort::Env(ORT_LOGGING_LEVEL_ERROR, "Face Detect");
Ort::Session *ort_session = nullptr;
Ort::SessionOptions sessionOptions = Ort::SessionOptions();
std::vector<char*> input_names;
std::vector<char*> output_names;
std::vector<std::vector<int64_t>> input_node_dims; // >=1 outputs
std::vector<std::vector<int64_t>> output_node_dims; // >=1 outputs
Ort::MemoryInfo memory_info_handler = Ort::MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU);
};
#endif
yolov8face.cpp
#include "yolov8face.h"
using namespace cv;
using namespace std;
using namespace Ort;
Yolov8Face::Yolov8Face(string model_path, const float conf_thres, const float iou_thresh)
{
/// OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0); ///如果使用cuda加速,需要取消注释
sessionOptions.SetGraphOptimizationLevel(ORT_ENABLE_BASIC);
/// std::wstring widestr = std::wstring(model_path.begin(), model_path.end()); ////windows写法
/// ort_session = new Session(env, widestr.c_str(), sessionOptions); ////windows写法
ort_session = new Session(env, model_path.c_str(), sessionOptions); ////linux写法
size_t numInputNodes = ort_session->GetInputCount();
size_t numOutputNodes = ort_session->GetOutputCount();
AllocatorWithDefaultOptions allocator;
for (int i = 0; i < numInputNodes; i++)
{
input_names.push_back(ort_session->GetInputName(i, allocator)); ///低版本onnxruntime的接口函数
////AllocatedStringPtr input_name_Ptr = ort_session->GetInputNameAllocated(i, allocator); /// 高版本onnxruntime的接口函数
////input_names.push_back(input_name_Ptr.get()); /// 高版本onnxruntime的接口函数
Ort::TypeInfo input_type_info = ort_session->GetInputTypeInfo(i);
auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();
auto input_dims = input_tensor_info.GetShape();
input_node_dims.push_back(input_dims);
}
for (int i = 0; i < numOutputNodes; i++)
{
output_names.push_back(ort_session->GetOutputName(i, allocator)); ///低版本onnxruntime的接口函数
////AllocatedStringPtr output_name_Ptr= ort_session->GetInputNameAllocated(i, allocator);
////output_names.push_back(output_name_Ptr.get()); /// 高版本onnxruntime的接口函数
Ort::TypeInfo output_type_info = ort_session->GetOutputTypeInfo(i);
auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();
auto output_dims = output_tensor_info.GetShape();
output_node_dims.push_back(output_dims);
}
this->input_height = input_node_dims[0][2];
this->input_width = input_node_dims[0][3];
this->conf_threshold = conf_thres;
this->iou_threshold = iou_thresh;
}
void Yolov8Face::preprocess(Mat srcimg)
{
const int height = srcimg.rows;
const int width = srcimg.cols;
Mat temp_image = srcimg.clone();
if (height > this->input_height || width > this->input_width)
{
const float scale = std::min((float)this->input_height / height, (float)this->input_width / width);
Size new_size = Size(int(width * scale), int(height * scale));
resize(srcimg, temp_image, new_size);
}
this->ratio_height = (float)height / temp_image.rows;
this->ratio_width = (float)width / temp_image.cols;
Mat input_img;
copyMakeBorder(temp_image, input_img, 0, this->input_height - temp_image.rows, 0, this->input_width - temp_image.cols, BORDER_CONSTANT, 0);
vector<cv::Mat> bgrChannels(3);
split(input_img, bgrChannels);
for (int c = 0; c < 3; c++)
{
bgrChannels[c].convertTo(bgrChannels[c], CV_32FC1, 1 / 128.0, -127.5 / 128.0);
}
const int image_area = this->input_height * this->input_width;
this->input_image.resize(3 * image_area);
size_t single_chn_size = image_area * sizeof(float);
memcpy(this->input_image.data(), (float *)bgrChannels[0].data, single_chn_size);
memcpy(this->input_image.data() + image_area, (float *)bgrChannels[1].data, single_chn_size);
memcpy(this->input_image.data() + image_area * 2, (float *)bgrChannels[2].data, single_chn_size);
}
////只返回检测框,因为在下游的模块里,置信度和5个关键点这两个信息在后续的模块里没有用到
void Yolov8Face::detect(Mat srcimg, std::vector<Bbox> &boxes)
{
this->preprocess(srcimg);
std::vector<int64_t> input_img_shape = {1, 3, this->input_height, this->input_width};
Value input_tensor_ = Value::CreateTensor<float>(memory_info_handler, this->input_image.data(), this->input_image.size(), input_img_shape.data(), input_img_shape.size());
Ort::RunOptions runOptions;
vector<Value> ort_outputs = this->ort_session->Run(runOptions, this->input_names.data(), &input_tensor_, 1, this->output_names.data(), output_names.size());
float *pdata = ort_outputs[0].GetTensorMutableData<float>(); /// 形状是(1, 20, 8400),不考虑第0维batchsize,每一列的长度20,前4个元素是检测框坐标(cx,cy,w,h),第4个元素是置信度,剩下的15个元素是5个关键点坐标x,y和置信度
const int num_box = ort_outputs[0].GetTensorTypeAndShapeInfo().GetShape()[2];
vector<Bbox> bounding_box_raw;
vector<float> score_raw;
for (int i = 0; i < num_box; i++)
{
const float score = pdata[4 * num_box + i];
if (score > this->conf_threshold)
{
float xmin = (pdata[i] - 0.5 * pdata[2 * num_box + i]) * this->ratio_width; ///(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float ymin = (pdata[num_box + i] - 0.5 * pdata[3 * num_box + i]) * this->ratio_height; ///(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float xmax = (pdata[i] + 0.5 * pdata[2 * num_box + i]) * this->ratio_width; ///(cx,cy,w,h)转到(x,y,w,h)并还原到原图
float ymax = (pdata[num_box + i] + 0.5 * pdata[3 * num_box + i]) * this->ratio_height; ///(cx,cy,w,h)转到(x,y,w,h)并还原到原图
////坐标的越界检查保护,可以添加一下
bounding_box_raw.emplace_back(Bbox{xmin, ymin, xmax, ymax});
score_raw.emplace_back(score);
/// 剩下的5个关键点坐标的计算,暂时不写,因为在下游的模块里没有用到5个关键点坐标信息
}
}
vector<int> keep_inds = nms(bounding_box_raw, score_raw, this->iou_threshold);
const int keep_num = keep_inds.size();
boxes.clear();
boxes.resize(keep_num);
for (int i = 0; i < keep_num; i++)
{
const int ind = keep_inds[i];
boxes[i] = bounding_box_raw[ind];
}
}



 闽公网安备 35020302035485号
闽公网安备 35020302035485号